Working principle and control method of DC brushless motor
Preface
Because the DC brushless motor has many advantages such as simple structure, reliable operation and convenient maintenance of the AC motor, and has many advantages such as high operating efficiency, no excitation loss and good speed regulation performance of the DC motor, it is in the current national economy. Domain applications are becoming increasingly popular.
For more than a century, electric motors have been used as electromechanical energy conversion devices, and their applications have spread throughout the realm of the national economy and people's daily lives. The main types are synchronous motors, asynchronous motors and DC motors. Since conventional DC motors are mechanically commutated by brushes, there is relative mechanical friction, which causes weaknesses such as noise, cremation, radio interference, and short life, coupled with high manufacturing costs and maintenance difficulties. The shortcomings have greatly limited its application range, and most of the current industrial and agricultural production uses three-phase asynchronous motors.
In view of the shortcomings of the above-mentioned conventional DC motor, as early as the 1930s, people began to develop a DC brushless motor that replaced the brush mechanical commutation with electronic commutation. After decades of hard work, it was finally realized in the early 1960s. Since the 1970s, with the rapid development of the power electronics industry, many high-performance semiconductor power devices, such as GTR, MOSFET, IGBT, IPM, etc., and the emergence of high-performance permanent magnet materials are all DC brushless motors. Wide application has laid a solid foundation.
Basic composition of three-phase DC brushless motor
The DC brushless permanent magnet motor is mainly composed of a motor body, a position sensor and an electronic switch circuit. The stator windings are generally made in multiple phases (three-phase, four-phase, five-phase, etc.), and the rotor consists of permanent magnets with a certain number of pole pairs (2p=2, 4,...). Figure 1 shows the structure of a three-phase two-pole DC brushless motor.
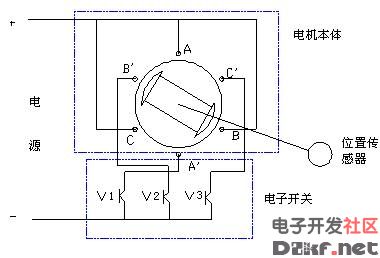
Figure 1 Three-phase two-pole DC brushless motor
The three-phase stator windings are respectively connected with corresponding power switching devices in the electronic switch circuit, and the A, B, and C phase windings are respectively connected to the power switch tubes V1, V2, and V3. The tracking rotor of the position sensor is coupled to the motor shaft.
When a phase of the stator winding is energized, the current interacts with the magnetic field generated by the magnetic pole of the permanent magnet of the rotor to generate torque, which drives the rotor to rotate, and then the position sensor converts the position of the rotor magnet into an electrical signal to control The electronic switch circuit is such that the stator windings are turned on in a certain order, and the stator phase currents are phase-shifted in a certain order as the rotor position changes. Since the conduction sequence of the electronic switch circuit is synchronized with the rotor rotation angle, it acts as a commutation of the mechanical commutator.
Figure 2 is a schematic diagram of the circuit of a three-phase DC brushless motor half-controlled bridge. Here, a photovoltaic device is used as the position sensor, and three power transistors V1, V2 and V3 constitute a power logic unit.
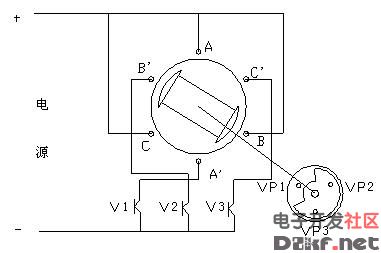
Figure 2 Three-phase DC brushless motor
The mounting positions of the three optoelectronic devices VP1, VP2 and VP3 are 120 degrees apart and evenly distributed at one end of the motor. The light emitted from the light source is irradiated to each of the photovoltaic devices at a time by the action of the rotating visor mounted on the motor shaft, and the position of the rotor magnetic pole is judged according to whether or not a certain photovoltaic device is irradiated with light.
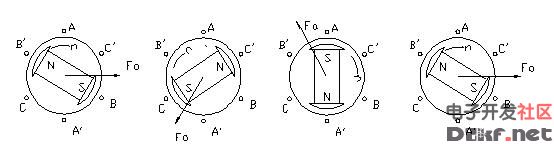
Figure 3 Schematic diagram of switching sequence and stator magnetic field rotation
The rotor position shown in Figure 2 corresponds to the position shown in Figure 3 a). Since the broadcasting device VP1 is irradiated with light, the power crystal V1 is turned on, and the current flows into the winding A-A'. The torque generated by the winding current and the rotor magnetic pole causes the magnetic pole of the rotor to follow the arrow in FIG. The direction is rotated. When the rotor pole turns to the position shown in Figure 3 b), the rotating visor mounted directly on the rotor shaft also rotates synchronously, and covers VP1 to illuminate VP2, thereby turning on transistor V1 and turning on transistor V2. The current is disconnected from the winding A-A' and flows into the winding B-B' such that the rotor pole continues to rotate in the direction of the arrow. When the rotor pole is turned to the position shown in Figure 3 c), the rotating shutter has already covered VP2, causing VP3 to be illuminated by light, causing transistor V2 to turn off and transistor V3 to turn on, so current flows into winding C-C', The drive rotor pole then continues to rotate in a clockwise direction and returns to the position of Figure 3 a).
Thus, with the rotation of the position sensor rotor segment, the stator windings are sequentially fed one phase and one phase under the control of the position sensors VP1, VP2, and VP3, thereby realizing the commutation of the phase winding currents. During the commutation process, the rotating magnetic field formed by the stator phase windings in the working air gap is hopping. This rotating magnetic field has three magnetic states within a 360 degree electrical angle range, each of which lasts for an electrical angle of 120 degrees. The relationship between the phase winding current and the rotor magnetic field of the motor is shown in Fig. 3. Fig. 3a) is the first state, and Fa is the magnetomotive force generated after the winding A-A' is energized. Obviously, the interaction between the winding current and the rotor magnetic field causes the rotor to rotate in a clockwise direction; after a 120-degree electrical angle, it enters the second state, when the winding A-A' is de-energized, and B-B' follows When the power is applied, the magnetic field generated by the stator winding is rotated by 120 degrees. As shown in Fig. 3 b), the motor stator continues to rotate in the clockwise direction; when it is rotated by 120 degrees, it enters the third state, and the winding B- B' is de-energized, C-C' is energized, and the magnetic field generated by the stator winding is rotated by 120 degrees, as shown in Figure 3 c); it continues to drive the rotor to rotate clockwise through 120 degrees. Return to the initial state. Fig. 4 shows a schematic diagram of the conduction sequence of each phase winding.
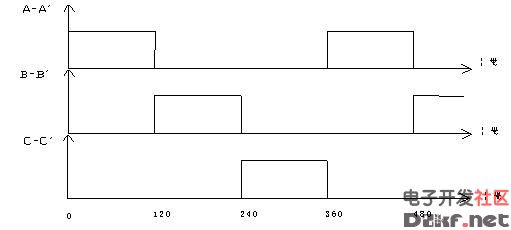
Figure 4 shows the conduction of each phase winding
position sensor
The position sensor plays a role in measuring the magnetic pole position of the rotor in the brushless DC motor, and provides correct commutation information for the logic switching circuit, that is, converts the position signal of the magnetic pole of the rotor magnet into an electric signal, and then controls the commutation of the stator winding. There are many types of position sensors, each with its own characteristics. The position sensors commonly found in DC brushless motors are as follows: electromagnetic position sensors, photoelectric position sensors, and magnetic sensitive position proximity sensors.
Electromagnetic position sensors In DC brushless motors, more open-ended transformers are used. The open transformer for a three-phase DC brushless motor consists of a stator and a tracking rotor. The stator generally has six poles, and the interval between them is 60 degrees. The three poles are wound around the primary winding, and are connected in series to each other to pass the high frequency power supply. The other three poles respectively surround the secondary windings WA and WB. WC. They are separated by 120 degrees. The tracking rotor is a cylinder made of a non-magnetic material and is provided with a 120-degree sector-shaped magnetically permeable material. It is connected to the motor shaft during installation and its position corresponds to a magnetic pole. The high-frequency magnetic flux generated by the primary winding is coupled to the secondary winding through the tracking rotor, so that an induced voltage is generated on the secondary winding, and the other two-phase secondary winding is connected to the same secondary winding due to the non-coupling loop. Its induced voltage is basically zero. As the rotor of the motor rotates, the sector is also rotated to move away from the current primary winding and to the next primary winding. In this way, as the rotor of the motor moves, a voltage is induced across the secondary winding of the open transformer. The angle of the sector-shaped magnetic conductive sheet is generally slightly larger than the electrical angle of 120 degrees, and is usually about 130 degrees of electrical angle. In the three-phase full control circuit, the angle of the sector-shaped magnetic permeable sheet is 180 degrees of electrical angle for the purpose of the commutation decoder. At the same time, the number of sector-shaped magnetic sheets should be equal to the number of pole pairs of the brushless DC motor.
The proximity switch position sensor is mainly composed of a resonant circuit and a sector-shaped metal rotor. When the sector-shaped metal rotor approaches the inductance L of the oscillating circuit, the Q value of the circuit is lowered, resulting in insufficient positive feedback of the circuit and stopping the vibration, so the output is zero. When the fan-shaped metal rotor leaves the inductance element L, the Q value of the circuit begins to rise, the circuit re-energizes, and the high-frequency modulation signal is output. After the diode is detected, the useful control signal is taken out to control the logic switch circuit to ensure the correct commutation of the motor. .
The photoelectric position sensor has been described above, and is made by using the photoelectric effect, and is composed of a visor that rotates together with the rotor of the motor, and a fixed light source and a photoelectric tube.
A magnetically sensitive position sensor is a semiconductor sensitive component whose electrical parameters vary with the surrounding magnetic field according to a certain law. The basic principle is the Hall effect and the magnetoresistance effect. Common magnetic sensors include Hall elements or Hall ICs, magnetoresistors, and magneto-sensitive diodes.
The results of the study show that the Hall electromotive force E generated on the semiconductor wafer can be expressed by the following formula:
![]()
![]()
Where R H - Hall coefficient ( ![]() );
);
I H - control current (A);
B——magnetic induction intensity (T);
d - sheet thickness (m);
P—— material resistivity (Ω*s);
u - material mobility ( ![]() );
);
If each constant is expressed by K H in the above formula, then
E=K H I H B
The electromotive force generated by the Hall element is very low, and it is inconvenient to apply directly. In practical applications, a Hall IC is used. The polarity of the output voltage of the Hall element varies with the direction of the magnetic field, and the position sensor of the DC brushless motor uses a switching Hall integrated circuit.
The magnetoresistance effect means that the resistance value of the component varies with the magnetic induction intensity, and the sensor made according to the magnetoresistance effect is called a magnetoresistive resistor.
The operating characteristics of a three-phase brushless DC motor are very difficult to analyze the operating characteristics of a DC brushless motor. The following assumptions are made in general engineering applications:
(1) The air gap magnetic induction of the motor is sinusoidally distributed along the air gap.
(2) When the winding is energized, the influence of the magnetic flux generated by the current on the air gap is negligible.
(3) The control circuit operates in the switching state, and the power transistor voltage drop is constant.
(4) The windings are symmetrical, and the corresponding circuits are completely identical, and the corresponding electrical time constants are ignored.
(5) The power consumption of the control circuit such as the position sensor is negligible.
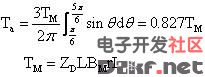
It is assumed that the magnetic induction generated by the rotor magnet is distributed sinusoidally in the air gap of the motor, that is, B = B M sin θ . Thus, if a continuous DC current is passed through a phase winding of the stator, the resulting torque is
T M =Z D LB M rIsinθ
Where Z D is the number of effective conductors per phase winding;
L——the effective length of the wire in the winding, ie the length of the magnetic steel;
R——the air gap radius in the motor;
I——winding phase current.
That is to say, after a certain constant current is applied, the torque generated by the action of the rotor and the magnetic field of the rotor will also vary according to the position of the rotor, as shown in Fig. 5.
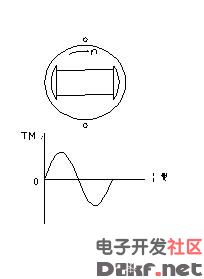
Figure 5 Single-phase torque at constant current. For the external load, the resulting motor has an average torque of zero. However, in the case of the three-phase half-control circuit of the DC brushless motor, a rectangular wave current of 1/3 cycle is passed in each phase winding. The torque generated by the action of this current and the rotor magnetic field is also only a section of the sinusoidal torque curve corresponding to 1/3 of the period, and this section of the curve is related to the relative position of the rotor when the winding starts to be energized. It is apparent that the transistor is turned on instantaneously as shown in Figure 6a, and the maximum average torque is produced. Because in this case, the current-carrying conductor is benefiting from a relatively strong air-gap magnetic field during the time that the winding is energized for 120 degrees. Therefore, it produces the smallest arterial motion and the average value is larger. It is customary to choose this as the reference point for the transistor to start conducting. In the case of =0 degrees, the total torque generated when the three-phase winding wheel of the motor is running is shown in Figure 6b.
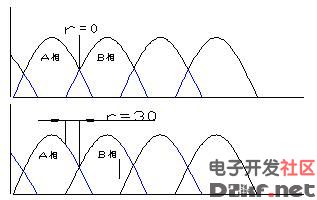
Figure 6 Three-phase DC brushless motor half-empty bridge torque If the on-time of the transistor is advanced or delayed, the ripple value of the torque will increase and the average value will decrease. When =30 degrees, the instantaneous torque of the motor crosses zero. That is to say, when the rotor is turned to a certain position, the torque generated by the motor is zero, and a dead point is generated when the motor starts. When ≥ 30 degrees, the instantaneous value of the motor torque will have a negative value, and the average value of the total output torque will be smaller. Therefore, in the case of three-phase and half-control, especially when starting, it should not be greater than 30 degrees. When the DC brushless motor is in normal operation, always try to adjust the angle to 0 degrees to maximize the average torque generated by the motor. . When =0 degrees, the average value of the output torque can be obtained:
After the motor rotates under the action of the electric torque, the rotating rotor magnetic field cuts the stator winding, and an electromotive force is induced on each phase winding. When the rotation speed n is constant, the electromotive force waveform is also a sine wave, and the phase is the same as the torque phase. Consistent. In this circuit, each phase winding is energized only in one cycle, so only during this period the applied voltage acts. Therefore, the applied electromotive force waveform is shown in Fig. 7 for the applied voltage.
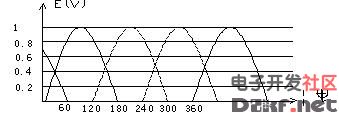
Fig. 7 The back electromotive force of the three-phase DC brushless motor half-control circuit can be obtained by the following formula to obtain the average value of the induced electromotive force:
From the above average torque and the average back electromotive force, the voltage balance equation of the DC brushless motor during stable operation can be obtained. For this purpose, the back EMF coefficient and the torque coefficient are first defined: 
They are constant for a particular motor. Of course, its size is related to the connection of the main circuit and the commutation mode of the power transistor.
The voltage balance equations of the three-phase half-bridge of the DC brushless motor are: ![]()
among them, ![]() ,
, ![]() After substituting it into the above formula, the mechanical property equation can be obtained as
After substituting it into the above formula, the mechanical property equation can be obtained as
![]()
Where n - the motor speed (r / min);
U——supply voltage (V);
△U—— power tube pressure drop (V);
K c - electromotive force coefficient;
T a - the average value of the electric torque generated by the motor (N?m);
K T - torque factor;
R——The internal resistance of the motor (Ω).
In a three-phase half-control circuit, the torque fluctuates between T M and T M /2, which is a disadvantage of the DC brushless motor.
Three-phase DC brushless motor application Three-phase half-control circuit Common three-phase half-control circuit is shown in Figure 8. In the figure, LA, LB, LC are the motor stator A, B, C three-phase winding, VF1, VF2, VF3 It is a three-MOSFET power tube that mainly functions as a switch. H1, H2, H3 are signals from the rotor position sensor. As mentioned above, in the three-phase half-control circuit, the output signal of the position sensor is required to be 1/3 cycle high level, 2/3 cycle is low level, and the phase between the sensor signals is required to be 1/3. cycle.
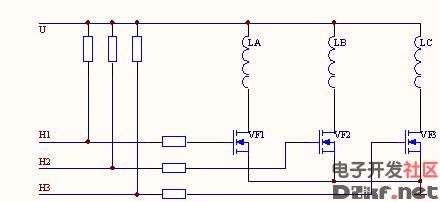
Figure 8 The three-phase half-controlled bridge circuit is the same as the general motor. When the motor starts, the back-electromotive force generated by the rotor flux cutting stator winding is very small, so the excessive current I may be generated. To this end, an additional current limiting circuit is usually required. Figure 9 is a common one. The voltage comparator in the figure is mainly used to limit the main loop current. When the current I passing through the motor winding is greater than the voltage drop IRf on the anti-locking resistor Rf is greater than When a given voltage U0, the comparator outputs a low level, and at the same time, three power field effect transistors of VF1, VF2, and VF3 are turned off, that is, the main circuit is cut off. When IRf "U0, the comparator does not work. When IRf < U0, the comparator outputs a high level, then it has no effect. I 0 = U 0 /R f is the maximum current to be limited, the size of which depends on the specific requirements. Generally take about 2 times the rated current.
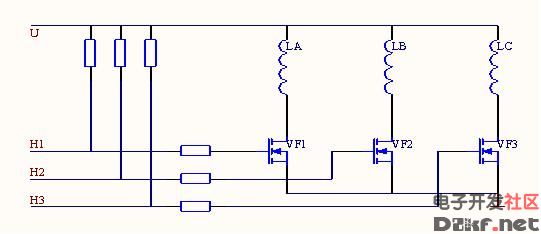
Fig. 9 Limitation of starting current Three-phase Y-connected circuit The three-phase half-control circuit has a simple structure, but the utilization of the motor body is very low. Each winding is only energized for 1/3 cycle, which is not fully utilized, and the torque is in operation. The fluctuation is large. In the case where the requirements are high, the three-phase full control circuit as shown in Fig. 10 is generally used. The three-phase full control circuit has two modes, two-phase commutation and three-three commutation.
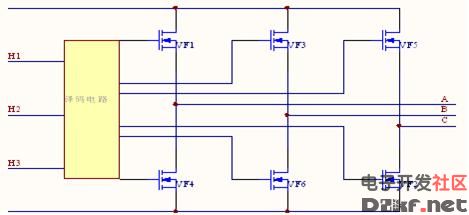
Figure 10 Three-phase full control circuit In this circuit, the three-phase winding of the motor is Y-coupled. If two or two energization modes are used, when the current is conducted from the power transistors VF1 and VF2, the current flows from the VF1 to the A-phase winding, and then from the C-phase winding to the power supply via the VF2. If the torque generated by the current flowing into the winding is positive, then the torque generated by the windings is negative, and the torque they synthesize is, the direction is on the bisector of the T a and -T c angles. When the motor rotates 60 degrees, VF1VF2 is energized and replaced by VF2VF3. At this time, the current flows from VF3 into the B-phase winding, and then flows out from the C-phase winding and returns to the power supply via VF2. At this time, the combined torque is also the same. However, the direction of the resultant torque T has rotated through an electrical angle of 60 degrees. Then each time a power tube is commutated, the direction of the resultant torque vector is rotated by 60 degrees. Therefore, the three-phase Y-phase full-control circuit is used for two-phase commutation, and the combined torque is increased by a factor of two. Each phase is commutated every 60 degrees, each power tube is energized by 120 degrees, and each winding is energized by 240 degrees, wherein the forward and reverse energizations are each 120 degrees. Its output torque waveform is shown in Figure 11. It can be seen from the figure that the torque fluctuation of the three-phase full control room is smaller than that of the three-phase half control, from 0.87T m to T m .

Figure 11 shows the output waveform of the full control bridge. The power-on sequence is VF1VF2VF3, VF2VF3VF4, VF3VF4VF5, VF4VF5VF6, VF5VF6VF1, VF6VF1VF2, VF1VF2VF3. When VF6VF1VF2 is turned on, current flows from the VF1 tube into the A-phase winding, and flows out from the VF**VF2 through the B and C-phase windings, respectively. After 60 degrees of electrical angle, the phase is commutated to VF1VF2VF3. At this time, the current flows from VF1 and VF3 respectively, and then flows into the C-phase winding through the A and B phase windings, and flows out through VF2. In this mode of energization, three power tubes are energized every instant. Each phase is commutated every 60 degrees, each time a power tube is commutated, and each power tube is energized 180 degrees. The combined torque is 1.5Ta.
The three-phase delta connection circuit can also be divided into two control modes: two-two power supply and three-three power supply.
Power-on sequence two two energization pattern is VF1VF2, VF2VF3, VF3VF4, VF4VF5, VF5VF6, VF6VF1, VF1VF2, when VF1VF2 turned on, current flows from VF1 flows, respectively, through the A-phase coil and B, C two-phase windings, and flows out from VF2 . At this time the winding is coupled to B, C two-phase windings in series and then in parallel through the A-phase winding, assuming that a current flows through the A-phase windings is I, flows through B, C-phase current windings are I / 2. Here the combined torque is 1.5 times the phase A torque.
Thirty-three sequence energization mode is VF1VF2VF3, VF2VF3VF4, VF3VF4VF5, VF4VF5VF6, VF5VF6VF1, VF6VF1VF2, VF1VF2VF3, VF6VF1VF2 when energized, current flows from the pipe VF1, while the A and B-phase windings, respectively, and flows out from the tube VF ** VF2, C-phase winding current does not pass, then the equivalent two-phase windings in parallel A, B. At this time, the two windings of A and B are connected in parallel, and the combined torque is twice the torque of the A phase.
Microcomputer Control of DC Brushless Motor Figure 12 shows the block diagram of the 8751 microcontroller to control the DC brushless motor. The P1 port of the 8751 is connected to the 7406 inverter to control the commutation of the DC brushless motor. The P2 port is used to measure the signals H1, H2 and H3 from the position sensor. The P0 port is connected to a digital-to-analog converter.
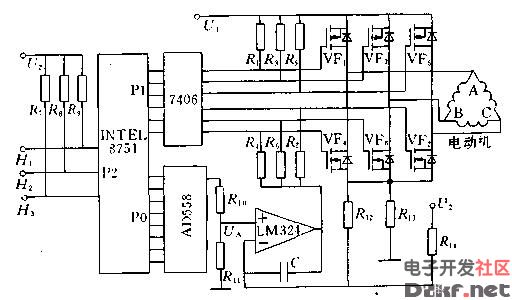
Figure 12 DC brushless motor computer control schematic commutation control According to the commutation mode of the stator winding, first find the state of the three rotor magnetic steel position sensor signals H1, H2, H3, and the relationship between the six power tubes It is placed in the EEPROM of the microcontroller in tabular form. According to the state from H1, H2, and H3, the corresponding power tube can be found and sent out through the P1 port to realize the commutation of the DC brushless motor.
The starting current is limited to the resistor R13 in the main circuit, so Uf=R13*IM, the magnitude of which is proportional to the current IM of the motor. The output voltage U0 of the Uf and the digital-to-analog converter is respectively sent to the two input terminals of the LM324 operational amplifier. Once the feedback voltage is greater than Uf than the given signal U0 from the digital-to-analog conversion, the LM324 outputs a low level, so that the main loop The three power tubes VF4, VF6, and VF2 cannot be turned on, thereby cutting off all current paths of the stator winding of the DC brushless motor, forcing the motor current to drop. Once the current drops to Uf less than U0, the LM324 output returns to the high level. The main circuit is also capable of conducting, which acts to limit the current.
Speed ​​Control During the normal operation of the DC brushless motor, the current of the DC brushless motor can be controlled by controlling the output voltage U0 of the digital-to-analog converter, thereby controlling the current of the motor. That is, the 8751 single-chip computer calculates the rotational speed of the motor through the period of the sensor signal, and compares it with the given rotational speed. If it is higher than the given rotational speed, the output value of the P2 port is reduced, the motor current is reduced, and the rotational speed is reduced. . On the contrary, the output value of the P2 port is increased, thereby increasing the rotational speed of the motor.
The speed control of the PWM control can also be realized by PWM. Figure 13 and Figure 14 show the control of the DC brushless motor speed by PWM control.
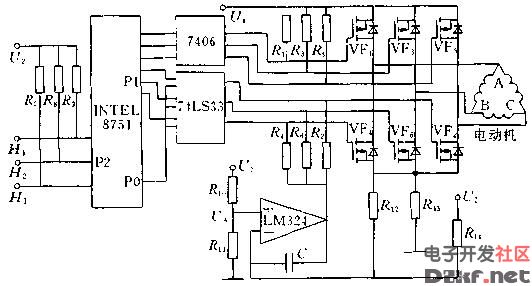
Figure 13 PWM control schematic
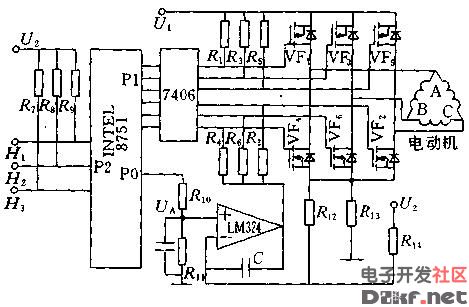
Figure 14 PWM control principle diagram DC brushless motor forward rotation reverse, change the direction of rotation to change its direction of rotation. The specific method only needs to replace the commutation control table.
Variable structure control realization When the DC brushless motor is in the starting state or in the adjustment process, the operating mode of the DC brushless motor is adopted to achieve the dynamic corresponding rapidity. Once the motor speed reaches the given value, immediately turn it. Into the synchronous motor operating mode to ensure its speed accuracy. At this time, the computer only needs to control the commutation of the motor at a certain frequency. At the same time, the computer measures the speed of the signal through the signal period of the position sensor and determines whether it falls out of synchronization. Once the cloth is lost, immediately go to the DC brushless motor and re-pull it into synchronization.
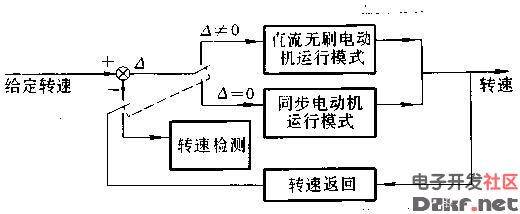
Figure 15 Variable Structure Control of Brushless DC Motor
The wire harness simplifies the building of these larger components by integrating the wiring into a single unit, or several units, for [drop-in" installation. By binding the many wires, cables, and subassemblies into a harness, the OEM or installer only has one component to install. In addition, a wire harness allows the completed assembly to be better secured against the effects of abrasion and vibration, and by constricting the wires into a non-flexing bundle, usage of space is optimized.
Game Machine Wire Assembly, wire harness for gaming machine, electrical wire assembly, gaming wire harnesses
ETOP WIREHARNESS LIMITED , https://www.etopwireharness.com