Abstract: This paper proposes a reversing radar design scheme based on the car MP3 player SH252, and introduces the software and hardware design ideas of the system. The system uses the EM78P153 single-chip microcomputer as the data acquisition part of the reversing radar, and uses the ultrasonic detection method to measure the distance. When reversing, the reversing radar will automatically start, and under the control of EM78P153, the ultrasonic signal will be sent by the probe on the rear bumper. When an obstacle is encountered, an echo signal will be generated. After the probe receives the echo signal, the probe will receive the echo signal. The data is processed by the controller and the actual distance between the vehicle body and the obstacle is calculated, and then the data is sent to the on-board MP3 player for distance display and voice synchronization prompting, providing an alarm prompt for the driver to improve driving safety.
Keywords: car MP3 player; EM78P153; ultrasonic ranging; voice synchronization prompt
In recent years, with the rapid development of automotive electronics technology, the market demand for reversing radars and car MP3 players with functions such as MP3 playback, radio, AUX-IN, and audio power amplifiers is increasing. However, the car MP3 player and the parking sensor on the market are two separate parts, which are inconvenient for users to use and install. Considering the popularity of car MP3 players and reversing radars in automobiles and the dependence of consumers on the two, it is necessary to combine the reversing radar function in the car MP3 player to develop the consumer market. Based on the original performance of a car MP3 player, this paper proposes a feasible solution to properly incorporate the parking sensor function.
This article focuses on the principle of ultrasonic distance measurement and how to combine the parking sensor with the car MP3 player.
1 overall system structure
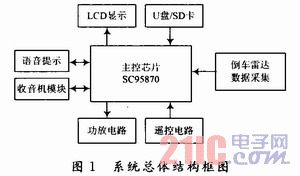
1.1 Reversing radar design structure The reversing radar design is based on a car MP3 player named SH252 independently developed by Jiangmen Aowei Electronics Co., Ltd. The overall block diagram of the system is shown in Figure 1. The main functions of SH252 are: songs that can play MP3 audio format, support for reading audio files in SD/MMC card/U disk, support AUX-IN mode, support digital FM full frequency (87.5~108.0MHz) electronic Tuned radio, 18 preset stations.
This article refers to the address: http://
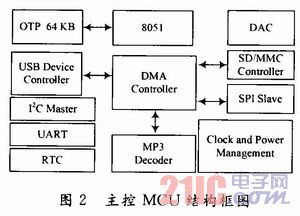
The main control MCU adopts SC95870 provided by Hangzhou Silan Microelectronics Co., Ltd., which is a SOC chip with built-in MCU, DSP, DMA controller, DAC and other modules. The internal structure block diagram is shown in Figure 2. SC95870 is an MP3 decoding player chip with USB Host function. It supports MP3 playback from a variety of storage media, including USB, SD/MMC card, chip built-in stereo DA C, LDO and PLL can effectively reduce the cost of the whole machine. It is widely used in home media playback systems and systems such as automotive electronics.
1.2 Main device selection Considering the functional requirements of the car MP3 player, as well as the production cost, internal resources of the chip, and other factors, the system uses the EM78P153 to realize the data acquisition module in the reversing radar design. The chip has 32 × 8 b on-chip SRAM, 1 024 × 13 b on-chip ROM, 12 programmable bidirectional multiplexing I / O, an 8-bit real-time chronograph / counter TCC, a programmable free-running gate Dog timer WDT. The EM78P153 chip has the design requirements, price advantage, and high technology maturity, so it has become the first choice for solution design.
The voice chip selects the AK020 with high cost performance, which is a one-time burning voice IC chip. Its main features are less feet, small size, DAC and PWM drive mode voice output, and fewer peripheral components. The chip can hold up to 64 sets of sound. User selectable 8-bit 5-bit and 4-bit data compression. Support 3 mode trigger function: independent mode, serial trigger mode, CPU command mode.
2 Scheme principle Reversing radar, also known as parking assist system. It is a safety aid for parking or reversing a car. It consists of ultrasonic sensors, controllers, displays and voice chips. It can inform the driver of obstacles around with the voice and more intuitive LCD display, avoiding obstacles damage to the car when the driver reverses, and even causing traffic accidents, and help the driver to remove the blind spot of the vision and enhance the rear view of the car. Ability to improve driving safety.
The ultrasonic ranging principle is based on the characteristics of strong directivity of the ultrasonic wave and slow energy consumption, and the ultrasonic wave transmits ultrasonic waves in a certain direction. Time is counted at the beginning of the launch time. When the ultrasonic wave propagates in the air, the obstacle is immediately reflected back, and the ultrasonic receiver stops timing immediately upon receiving the reflected wave. The propagation speed of the ultrasonic wave in the air is v, and based on the time t between the transmitted ultrasonic wave recorded by the timer and the received echo, the distance l between the emission point and the obstacle can be calculated, namely:
l=vt/2 (1)
This is the ultrasonic time difference ranging method.
The reversing radar data acquisition system is shown in Figure 3. The system transmits a 40 kHz signal from the data acquisition chip EM78P153 and four channel selection signals to control the transmission of the ultrasonic signal. When the driver turns the handle to the reverse gear, the car MP3 player automatically switches to the reverse mode, and starts the timer/counter TCC, and turns off the TCC after receiving the echo signal. Through the chronograph/counter TCC, the time from the launch to the reflection of the obstacle is accurately measured, the detection distance between the car and the obstacle is calculated according to the speed of the ultrasonic wave, and the detection distance is sent to the main control chip. The detection distance is displayed on the LCD in real time through the main control chip, and a corresponding alarm prompt is issued.

3 system part design
3.1 EM78P153 data transmission After the chip EM78P153 collects the data of the detection distance, it sends the 4 channels of data to the main control chip through the single-wire interface. Considering that the transmission distance is very short, no verification is used in the data coding. The specific coding has the following characteristics:
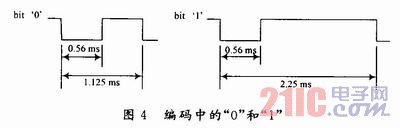
Using a serial code with a different pulse width, a combination of a pulse width of 0.565 ms, an interval of 0.56 ms, and a period of 1.125 ms represents a binary "0"; with a pulse width of 0.565 ms, interval 1 A combination of .685 ms and a period of 2.25 ms represents a binary "1" whose waveform is shown in Figure 4.
The above 0 and 1 constitute a continuous 32-bit binary code group, the first 16 bits are the detection distances collected by the ultrasonic transmitter/receiver 1 and the ultrasonic transmitter/receiver 2, respectively, and the last 16 bits are the ultrasonic transmitter/receiver 3, respectively. And the detection distance collected by the ultrasonic transmitter/receiver 4, as shown in FIG. The pilot code consists of a low level of 9 ms and a high level of 4.5 ms. Among them, 8-bit data code, combination of 7th and 6th digits represents 4-way sensor, "00" means sensor 1, "01" means sensor 2, "10" means sensor 3, "11" means sensor 4; 5th place Always equal to 0; the remaining 5 bits of data represent the probe distance.

3.2 Voice alarm prompts Alarm prompts and voice reports are composed of voice chip AK020 and other peripheral devices. Report and alarm based on the distance between the car and the obstacle. The required voices are entered into the specified memory in a certain order before application. The voice content distribution list is shown in Figure 6.

Each time the pulse trigger signal is sent, the reset count signal is sent first. The reset pulse counter is greater than 100 μs. After waiting for 100 μs, the trigger signal is sent again, and the nth trigger signal is sent to the voice chip, and the nth segment of speech is played. When the car is more than 1 m between the obstacle and the obstacle, the voice chip does not report the number. At this time, the distance is displayed by the LCD, and the buzzer emits a "beep" sound. When the car is 1 m away from the obstacle, the voice chip plays “1 m†voice through the speaker. When the car is 0.9 m away from the obstacle, the voice chip plays “0.9 m†voice through the speaker and displays through the LCD. Remind the driver of the current distance. When the car is less than or equal to 0.5 m from the obstacle, the voice chip continuously plays the "parking" voice through the speaker.
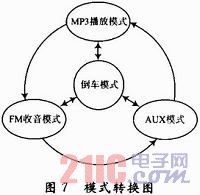
3.3 Mutual conversion between modes When the driver turns the handle to the reverse gear, the reversing radar starts collecting the data of the detection distance and sends an interrupt request to the main control chip through the single-wire interface. The main control chip responds to the interrupt, processes the received data by the interrupt program, and judges that the data is valid, and sends a message of "reverse start" to the message queue. The main program receives the "reverse start" message, and the car MP3 player enters the mode conversion process. There are two steps in the mode conversion process: first, save some parameters in the current mode and set the current mode to reverse mode. Return to the original mode after the reverse mode is over, as shown in Figure 7.
Then, the display module and the voice prompt module in the calling program are entered into the parking sensor mode, and the detection distance is displayed on the LCD in real time, and a corresponding alarm prompt is sent through the voice chip. After the reversing, the reversing radar stops transmitting the detection distance data, and sends a message of "reverse end" to the message queue. After the main program receives the "reverse end" message, the car MP3 player returns to the mode before reversing.
4 Conclusion The reversing radar design is an organic combination of the car MP3 player and the reversing radar, which brings convenience to the user in practical use and installation. Since the design is based on the already-designed car MP3 player SH252, and the SH252's main control chip input/output port resources are limited, the EM78P153 is used in the reversing radar design for the detection distance during the reversing process. Data collection. The next direction of the design is to control the transmission of the ultrasonic signal and the acquisition of the detection distance data on the main control chip of the car MP3 player.
Asterbar Disposable ecig have a completely enclosed design, reducing the need for charging and replacing cartridges. The no-charge design also reduces the occurrence of faults. It is understood that with rechargeable e-cigarettes, each cartridge needs to be charged at least once and the battery efficiency is extremely low, while the design of disposable ecig can solve this problem very well.
Disposable Asterbar E-Cigarette,Mini Asterbar E Cigarette,Asterbar Electronic Cigarette Customizing,RechargeableAsterbar E Cigarette
Shenzhen E-wisdom Network Technology Co., Ltd. , https://www.healthy-cigarettes.com