In the high-performance stable platform servo system composed of servo motor and servo driver, it is necessary to obtain the rotation angle and rotation speed information of the servo motor in real time. High-speed and high-precision sensors and corresponding peripheral circuit design are indispensable. Due to the limitations of the MCU's own resources, it is difficult to meet the requirements of high precision, high computing rate and fast real-time performance of the current servo system. In the stable platform servo control system, DSP has gradually replaced the microcontroller and become the mainstream chip. This design uses TI's 32 bit floating-point DSP chip TMS320F28335, its working clock frequency is up to 150 MHz, with powerful computing power, can complete complex control algorithms in real time. The on-chip integrates a wealth of motor control peripheral components and circuits, simplifying the hardware design of the control circuit and improving the reliability of the system.
In this study, the new development board ICTEKE-F28335-A of DSP is used, and the EQEP module and photoelectric encoder are used to design a solution for measuring the speed of the servo motor. At the same time, the digital-to-analog conversion (D/A) module on the development board is utilized. After the voltage conversion and amplification, the control of the servo motor speed is completed, and a closed loop system for controlling the servo motor of the stable platform is realized. Practice shows that the system has the advantages of low power consumption, low cost and simple structure. At the same time, it has the characteristics of high precision, high resolution and fast real-time performance, which makes the stable platform servo system achieve better control effect.
1 Stable platform servo system structure
The main technology of stable platform application is servo control technology. This system realizes the speed control of Panasonic servo MINAS A series servo motor. It is mainly driven by Panasonic servo MINAS A series servo drive, servo motor, corresponding photoelectric encoder and TMS320F28335. Control the development board, the corresponding ICETTEK-5100USB emulator, and the peripheral circuits necessary to implement the closed-loop process. The structure of the servo system is shown in Figure 1.
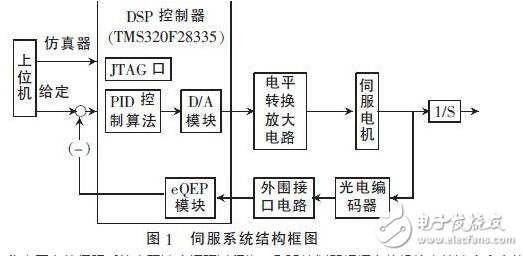
The servo system of the stable platform realizes the speed closed-loop process: the DSP controller calculates the error value of the motor speed according to the speed command value given by the upper computer minus the speed feedback value, and generates the motor speed through the digital filter (adjustment algorithm) of the driving unit. The control signal, that is, the D/A module generates an analog voltage, and is level-converted to a voltage range that can control the servo motor, thereby realizing the rotation speed control of the servo motor. The feedback value is based on the orthogonal pulse signal fed back by the incremental photoelectric encoder, and is separated and shaped by the optocoupler to provide the feedback signal to the eQEP module of the TMS320F28335. The pulse signal is calculated according to the M/T counting method, and the motor speed is calculated and fed back to the upper computer to realize automatic control, so that the stable platform can isolate the carrier motion and establish a stable reference plane [1]. The power module converts the +5 V voltage provided by the switching power supply to +3.3 V to power the system.
2 servo system hardware design
2.1 eQEP module of TMS320F28335
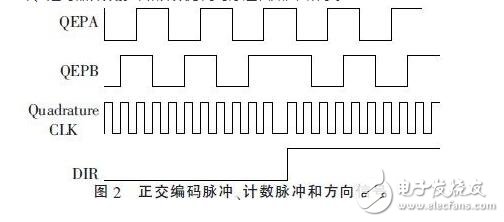
The eQEP module of the TMS320F28335 is an enhanced quadrature decoding module mainly used in motion control systems. It provides a direct interface to the encoder. The position, direction and speed of the motor can be obtained through the eQEP module. The TMS320F28335 provides four pin signals to the quadrature decoding module inside the eQEP via the GPIO multiplexer. The QDU (Quadrature Decoding Unit) decodes the direction and pulse of the received quadrature pulse signal of the encoder. After decoding, The position pulse signal and the direction signal of 4 times frequency are obtained and sent to the position counter for pulse counting. Set the encoder control register QDECCTL to the quadrature counting mode, observe the direction of the orthogonal direction flag in the status register QEPSTS to observe the direction of rotation, increase the count when clockwise, and count down when counterclockwise. The actual position information of the motor can be obtained by reading the value of the position counter QPOSCNT by the program, and the position information can be used for closed-loop control with the given position information. In addition, the speed information of the motor can also be calculated by the QCAP module. The orthogonal coded pulse, timer count pulse and count direction timing logic are shown in Figure 2.
2.2 Optical encoder and interface circuit of TMS320F28335
The encoder signal of the servo system is the differential signal output from the servo driver, and the DSP needs the TTL signal. Therefore, it is necessary to perform the signals OA+, OA-, OB+, OB-, OZ+ and OZ- output by the encoder before the acquisition. Conversion, the system uses AM26LS32 chip to receive differential signals, the received output signals are A, B and Z 3 signals, wherein the A and B signals have a phase difference of 90°. The signal output by the photoelectric encoder is optically isolated and shaped and sent to the corresponding pins of the DSP eQEP module. The interface circuit is shown in Figure 3. Among them, 6N137 is a high-speed optocoupler chip that realizes the isolation of digital signals and analog signals; 74HC14 is a high-speed CMOS inverter that realizes shaping of input pulse signals. Figure 3 only shows the optical isolation and shaping of the OA+ and OA- signals of the photoelectric encoder output. The optically isolated and shaped signals are sent to the EQEP1A, EQEP1B and EQEP1I of the TMS320F28335 peripheral pins for orthogonal decoding.
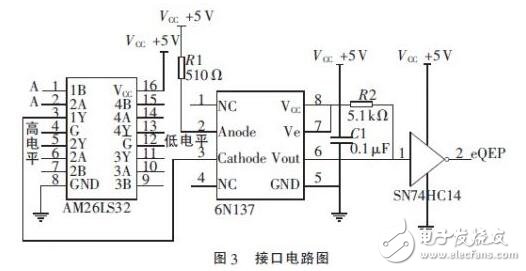
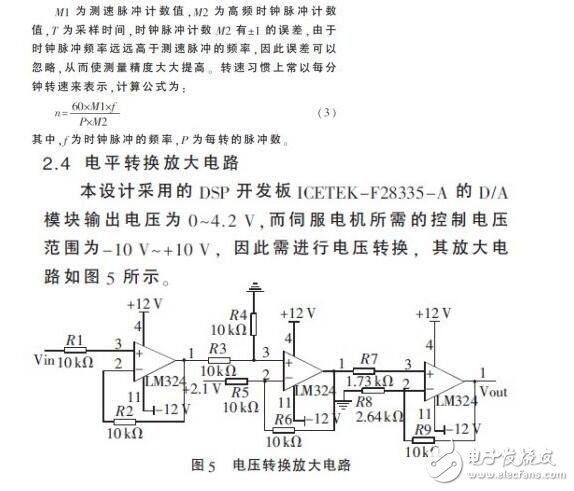
Due to the large output impedance of the DSP development board, the voltage loss causes severe attenuation loss. Therefore, a voltage follower is added before the amplifier circuit to play the impedance matching function, so that the post-stage amplification circuit can work better.
3 servo system software design
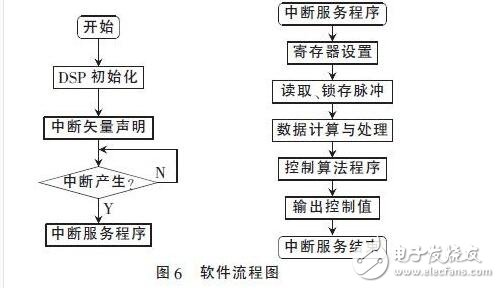
The software debugging and development of the system adopts the CCSV3.3 version for TMS320F28335. TI's software development tool CCS (Code Composer Studio) provides a visualization window that integrates all code generation tools. All user development processes are carried out in CCS, including project creation, source program editing, and program. Compilation and debugging, in addition, CCS also provides a real-time operating system DSP / BIOS, greatly facilitating debugging and development. The DSP program of this system is mainly divided into two modules: the main program and the interrupt service program. The main program module mainly implements initialization of each function module, definition of memory variables, and declaration of interrupt vectors. The interrupt program module mainly implements the setting of related registers, reading and latching the pulse count of the eQEP module, the feedback of the detection circuit, and the program of the control algorithm. The software flow is shown in FIG. 6.
In this paper, the design of the stable platform servo system is proposed. The eQEP module of DSP chip TMS320F28335 is used to decode and count the pulse signal of the photoelectric encoder, and the angle and speed information of the servo motor are obtained, which is compared with the given value of the upper computer. The adjustment algorithm causes the D/A module to generate a voltage signal to speed control the servo motor. The research shows that the design has high response speed, stable accuracy and strong anti-load disturbance ability, which fully realizes the high-precision control of the stable platform. At the same time, the system has strong robustness and adaptability, which verifies the effectiveness of the scheme and provides a high-performance digital solution for different control fields.
Breaker Rccb,Rccb Breaker,Rccb Circuit Breaker,Circuit Breaker Rccb
ZHEJIANG QIANNA ELECTRIC CO.,LTD , https://www.traner-elec.com