1.PID is a closed loop control algorithm
Therefore, to implement the PID algorithm, you must have closed-loop control on the hardware, that is, you must have feedback. For example, to control the speed of a motor, you must have a sensor that measures the speed and feed the result back to the control route. The speed control is also taken as an example below.
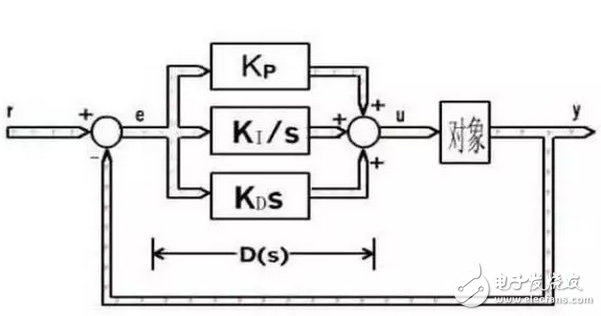
2. PID is proportional (P), integral (I), differential (D) control algorithm
But it is not necessary to have these three algorithms at the same time, it can also be PD, PI, or even only P algorithm control. One of my simplest ideas for closed-loop control was P control, which feeds back the current results and subtracts them from the target. If it is positive, it will decelerate. If it is negative, it will accelerate. Now know that this is just the simplest closed loop control algorithm.
3. Proportional (P), integral (I), and differential (D) control algorithms have their own effects
Proportion, the basic (current) deviation e(t) of the reaction system, the coefficient is large, which can speed up the adjustment and reduce the error, but the excessive ratio makes the stability of the system decrease, and even the system is unstable;
Integral, the cumulative deviation of the reaction system, so that the system eliminates the steady-state error and improves the no-difference. Because of the error, the integral adjustment is performed until there is no error;
Differential, reflecting the rate of change of the system deviation signal e(t)-e(t-1), is predictive, can predict the trend of deviation change, and produces advanced control effect. It has been differentially adjusted before the deviation has not formed. Eliminated, thus improving the dynamic performance of the system. However, the differential has an amplification effect on the noise interference, and the enhanced differentiation is detrimental to the system's anti-interference. Both integration and differentiation cannot work alone and must be coordinated with proportional control.
4. Controller P, I, D item selection
The following summarizes the control characteristics of various commonly used control laws:
(1) Proportional control law P: The P control law can quickly overcome the influence of disturbance. Its effect on the output value is fast, but it can not be stabilized at an ideal value. The bad result is more effective. Overcoming the effects of disturbances, but there is a surplus. It is suitable for occasions where the control channel has less hysteresis, the load changes little, the control requirements are not high, and the controlled parameters are allowed to have a margin within a certain range. Such as: the water pump room cooling and hot water level control under the Jinyu Public Works Department; the oil level control of the oil pump house.
(2) Proportional integral control law (PI): Proportional integral control law is the most widely used control law in engineering. The integral can eliminate the residual on the basis of the ratio. It is suitable for occasions where the control channel has less hysteresis, the load does not change much, and the controlled parameter does not allow the residual. Such as: heavy oil flow control system of F1401 to F1419 gun in heavy oil reversing room of main line kiln head; oil supply pipe flow control system of oil pump house; temperature regulation system of each area of ​​annealing kiln.
(3) Proportional differential control law (PD): The differential has a leading role. For the control channel with capacity lag, the differential participation control is introduced. When the differential term is set properly, it has a significant effect on improving the dynamic performance index of the system. . Therefore, in the case where the time constant or capacity hysteresis of the control channel is large, in order to improve the stability of the system, the dynamic deviation can be reduced, and the proportional differential control law can be selected. Such as: heating type temperature control, composition control. It should be noted that for those areas with pure hysteresis, the differential term is powerless, and in systems where the signal is noisy or periodically vibrating, differential control is not appropriate. Such as: the control of the glass level of the big kiln.
(4), example integral differential control law (PID): PID control law is an ideal control law, which introduces the integral on the basis of the proportion, can eliminate the residual, then add the differential action, and can improve the stability of the system. Sex. It is suitable for occasions where the control channel time constant or capacity lag is large and the control requirements are high. Such as temperature control, composition control, etc.
In view of the role of the D law, we must also understand the concept of time lag, which includes capacity lag and pure lag. The capacity lag usually includes: measurement lag and transmission lag. Measuring hysteresis is a kind of hysteresis that the detecting component needs to establish a balance when detecting, such as thermocouple, thermal resistance, pressure, etc., which is slow to respond. The transmission lag is a kind of control lag generated by sensors, transmitters, actuators and other equipment. Pure hysteresis is relative and measurement lag. In industry, most of the pure lag is caused by material transfer. For example, the kiln glass level requires a long period of time during the action of the feeder to the nuclear level meter.
In short, the selection of the control law should be selected according to the process characteristics and process requirements. It is by no means that the PID control law has better control performance under any circumstances, and it is unwise to adopt it regardless of the occasion. If you do this, it will only add complexity to other work and bring difficulties to parameter tuning. When the PID controller is used, the other control schemes need to be considered. Such as cascade control, feedforward control, large hysteresis control, etc.
5. Formula
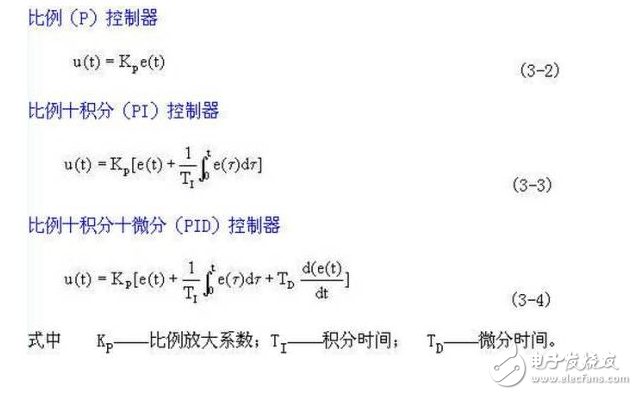
Calculation of the value pid:
6. Question
The setting of three parameters of Kp, TI and Td is a key issue of the PID control algorithm. Generally speaking, only the approximate values ​​of them can be set during programming, and the optimal value is determined by repeated debugging while the system is running. Therefore, the debugging phase program must be able to modify and memorize these three parameters at any time.
7. Self-tuning of parameters
In some applications, such as the general instrument industry, the working object of the system is uncertain. Different objects have to adopt different parameter values. If the parameters cannot be set for the user, the concept of parameter self-tuning is introduced. The essence is to find a set of parameters for the new work object through N measurements when first used, and remember it as the basis for future work.
FTTH Drop Cable Patch Cord,Plastic Box With Splitter,Wall Mounted Fiber Terminal Box
ShenZhen JunJin Technology Co.,Ltd , https://www.jjtcl.com