1) The real-time tcp speed of the robot can be output through the system analog quantity.
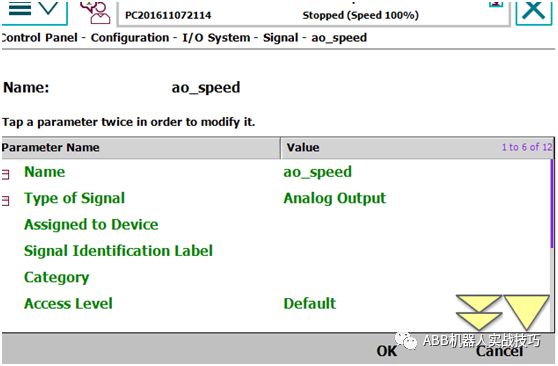
2) Control panel, configuration, new analog output in signal is as follows (for example, virtual AO, can also establish real analog output such as DSQC651)
3)
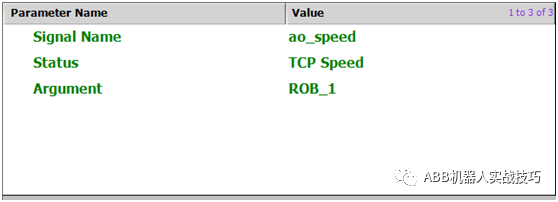
4) Associate the secondary signal to the system output
5) In the control panel, the system ouput is newly created, the signal name is just created analog output, and the status selects TCP Speed.
6)
7) At this time, the real-time tcp speed of the robot can be obtained by the analog quantity ao_speed. This signal can be used on some processes related to robot speed.
8) I want to write the screen speed in real time when the robot runs to certain positions, how to achieve
9) can be achieved by the MoveLSync statement
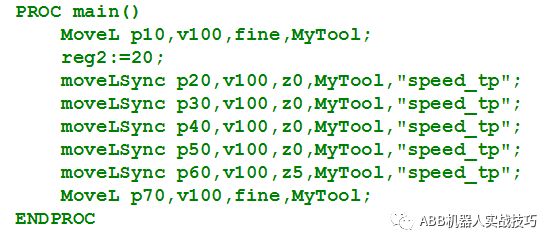
10) The MoveLSync and MoveL statements are the same. At the end of the statement, the program called when the robot arrives at the position is added. There is no motion instruction in the program. If zonedata is used, the program is called when the robot reaches the closest set position, and the advance distance similar to triggerIO is 0.
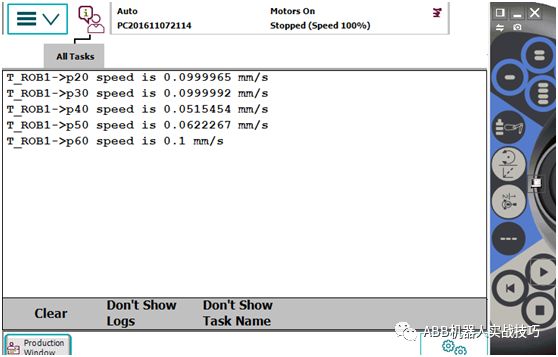
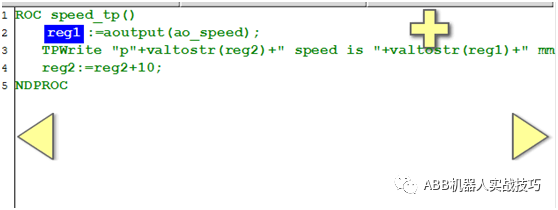
11) The Speed_tp program is as follows. That is, get the real-time speed first, then write the screen.
12)
800 Puffs Vape,Electronic Smoke,Puff Bar Electronic Cigarette,Pure Smoke Electronic Cigarette
Guangzhou Yunge Tianhong Electronic Technology Co., Ltd , https://www.e-cigaretteyfactory.com